Elastic Registration of Ultrasound Images
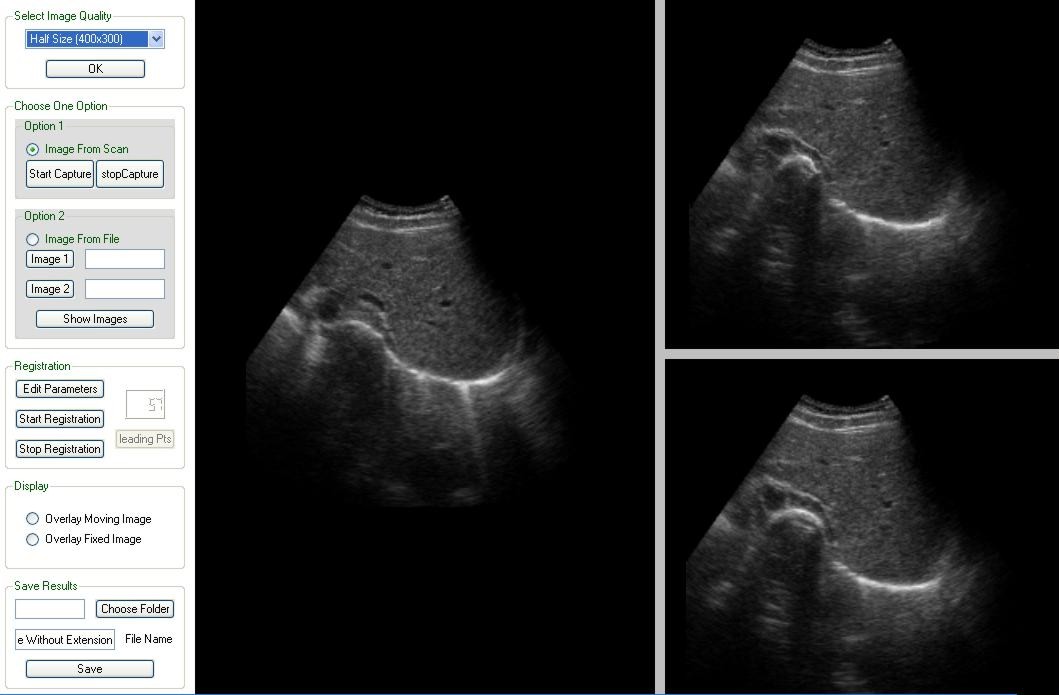
We have developed a series of new registration techniques that utilize attribute vectors to select similar feature points in consecutive ultrasound volumes. The primary advantage of these techniques is their low computational complexity and real time performance. These methods have been tested on images of the liver as well as the carotid artery and results show that the techniques are both robust and flexible. You may find further details in Foroughi et al. and Leung et al.
Real-time Segmentation of Ultrasound Images
We have developed a novel segmentation technique to extract cavity contours from ultrasound images. The problem is first discretized by projecting equispaced radii from an arbitrary seed point inside the cavity towards its boundary. The distance of the cavity boundary from the seed point is modeled by the trajectory of a moving object. The motion of this moving object is assumed to be governed by a finite set of dynamical models subject to uncertainty. Candidate edge points obtained along each radius may include the actual object position and some false measurements. This modeling approach enables us to employ the interacting multiple model (IMM) estimator along with a probabilistic data association filter (PDAF) for contour extraction. Since the method does not employ any numerical optimization, convergence is very fast. You may find further details on this technique in Abolmaesumi et al. and on its variation in Guerrero et al.
Registration Error in Image Guided Surgery
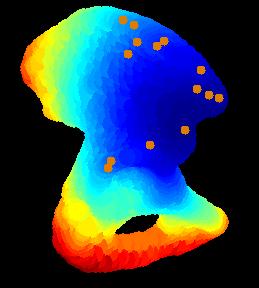
Image registration is a single point of failure in the image-guided computer-assisted surgery. Registration is primarily used to align and fuse the data sets taken from patient’s anatomy before and during surgeries. Point-based rigid-body registration is usually performed by identifying corresponding fiducials (either natural landmarks or implanted ones) in the data sets. Since the localization of fiducials is imprecise and is generally perturbed by random noise, the performed registration is imperfect and has some error. We have derived novel formulations that relate the error distribution in the fiducial localization to the accuracy of the performed registration. We have also presented closed-form formulations that can generate probability density function of registration error. Please refer to a series of papers published by Moghari and Abolmaesumi.